RGB-D tracking (ViSP/ROS) - 2nd demo
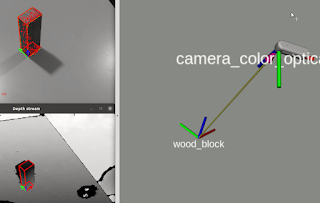
Using the infrastructure described in my last post, where ViSP communicates with ROS via a TCP/IP socket connection, this is the result of the RGB-D tracking:
I believe that this result is good enough for now. On the ROS side, we simply have the robot state publisher (responsible for the camera links) and the client node (responsible for the woodblock link). These two agents are continuously publishing the transformations.

One issue that we can already notice is that, in ROS, now we have neither the RGB image topic nor the depth map topic, which restricts us to create the pointcloud where we could clearly see the woodblock. A possible way around this issue is to send the images through the socket communication channel as well.
For now, let's consider this step halfway concluded. Now it's time to control the robot!
The challenge for the next few days is to remotely control the UR10e collaborative robot.


Comments
Post a Comment