RobotIQ gripper force test experiment #1
For a better understanding of how does the force value work and what it really translates, I performed a simple test:
Requested to completely close the gripper, at the lower possible speed.
At the same time, I requested the instant status (position and force) from the gripper. This status request was made at 10 Hz (10 times per second).
I did this test twice:
- Without any object (two gripper fingers touching each other)
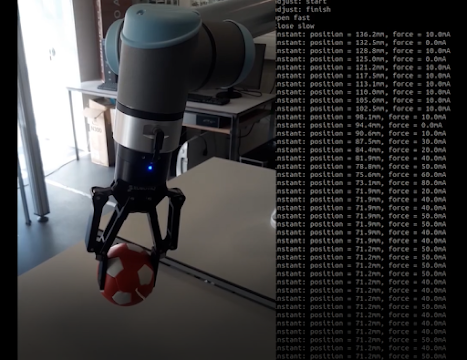
- With a soft red ball that can be squeezed (to check for force values variance)
The result showed a high value of force right before the last gripper fingers position, both when there was no object and when the robot grabbed the soft red ball.
After this force high value, the gripper has become stable, not moving its fingers anymore and holding the same force value for the rest of the time.
We can see the results in this small video:


Comments
Post a Comment